



Вчені з німецького Університету Берна розробили нового медичного робота, який дозволить суттєво полегшити проведення операції кохлеарної імплантації. Апарат здатний в напівавтоматичному режимі розпізнавати анатомічні особливості внутрішнього вуха пацієнтів і з високою точністю висвердлювати канал для імплантату.

Щорічно у всьому світі проводиться в середньому 65 тисяч кохлеарних імплантацій. Деякі операції закінчуються невдало – пацієнти остаточно втрачають слух. Справа в тому, що операція кохлеарної імплантації вимагає високої точності дій; найменша помилка може призводити до пошкодження лабіринту або лицьового нерва, частина якого проходить поблизу ділянки, де проводиться операція. Німецький робот покликаний звести до мінімуму помилки хірургів при проведенні операції кохлеарної імплантації.
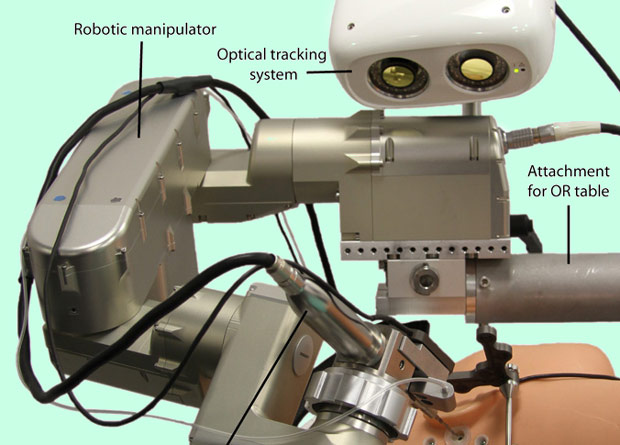
Робот складається з оптичної системи високої чіткості, яка дозволяє деталізовано спостерігати за операцією, маніпулятора і хірургічного дриля. Під час випробування на пацієнті під контролем за допомогою комп’ютерного томографа робот в напівавтоматичному режимі визначив особливості анатомічної будови пацієнта і розрахував траєкторію свердління довжиною 23 міліметра з закінченням біля овального вікна завитки.
Перед початком свердління фахівці звірили правильність потрібної траєкторії, а потім віддали роботу команду перевірити її. Після повторного огляду робот трохи скорегував траєкторію і приступив до свердління. Процедура пройшла успішно. Контрольне ендоскопічне дослідження показало, що зроблений роботом отвір вийшов рівним і точним. Згодом були успішно встановлені електроди кохлеарного імплантату.
Розробники стверджують, що їхній робот можна буде використовувати не тільки для свердління каналів до внутрішнього вуха, а й для безпосередньої установки електродів імплантату. На думку вчених, це дозволить ще більше підвищити точність операцій. Проте, без ретельних випробувань новий робот до проведення операцій на регулярній основі допущений не буде.