


Сучасна робототехніка переживає важливий етап розвитку, переходячи від контрольованих демонстрацій до самостійних систем. Це дозволяє роботам надійно працювати в реальних, непередбачуваних умовах. На Міжнародній конференції з робототехніки та автоматизації (ICRA) NVIDIA Research представила вісім доповідей. Вони показують, як перенесення розробок із симуляцій у реальний світ стає ключовим елементом цього переходу. Ця стратегія допомагає роботам сприймати світ, аналізувати дані, планувати дії. Це також дозволяє їм ефективно функціонувати у динамічному середовищі. Загалом, дослідження охоплюють всі виклики для розробників. Досягнення NVIDIA у робототехніці, де ШІ активно розвʼязує складні задачі, охоплюють координацію декількох рук. Також йдеться про універсальні політики для різних роботів. Симуляції спрощують захоплення нових обʼєктів. Роботи тепер здатні до точного складання та використання візуально-мовних моделей для обмірковування дій.
Оптимізація координації та навігації робототехніки NVIDIA
Уявіть фармацевтичну лабораторію, де працюють роботизовані руки. Вони підбирають пробірки, переливають рідини, змішують реагенти. Кожен етап має різну тривалість. Усі дії потребують ретельної координації. Традиційне програмне забезпечення для роботів обробляє ці кроки послідовно. Тобто, одна рука працює за раз. Система ScheduleStream змінює підхід. Вона виконує обчислення на графічних процесорах (GPU). Це дозволяє кільком рукам планувати рухи та діяти паралельно. Результатом є трикратне прискорення у сценаріях планування. Це досягається на апаратному забезпеченні, як NVIDIA Jetson edge AI платформа. Код для фреймворку доступний на GitHub.
Робот, який навчається навігації, зазвичай засвоює це в одному конкретному корпусі. Якщо встановити те саме програмне забезпечення на робота іншої форми, воно часто перестає працювати. Причина — різні рухи компонентів. Фреймворк політики COMPASS вирішує цю проблему. Спочатку він створює базову функціональність навігації. Використовується навчання через імітацію. Потім застосовується підкріплювальне навчання в NVIDIA Isaac Lab. Це дозволяє створювати спеціалістів для різних тіл роботів. Важливо, що дані реальних роботів не залучаються. Все навчання відбувається в симуляції Isaac Lab. COMPASS показав 4.5-кратне покращення середнього показника успіху. Це у порівнянні з базовим навчанням. Система легко переноситься у реальний світ. Вона демонструє близько 80% успіху під час 20 навігаційних випробувань, яке стосується автономних мобільних роботів та гуманоїдів. COMPASS — це зручна для агентів система. Вона має спеціалізовані навички. Розробники можуть підʼєднати цей конвеєр. Для цього використовується NVIDIA Omniverse NuRec, яке дозволяє навчати та перевіряти роботів. Йдеться про цифрового двійника нового середовища, яка відбувається перед їхнім розгортанням.
Розумне захоплення та маніпуляції з обʼєктами
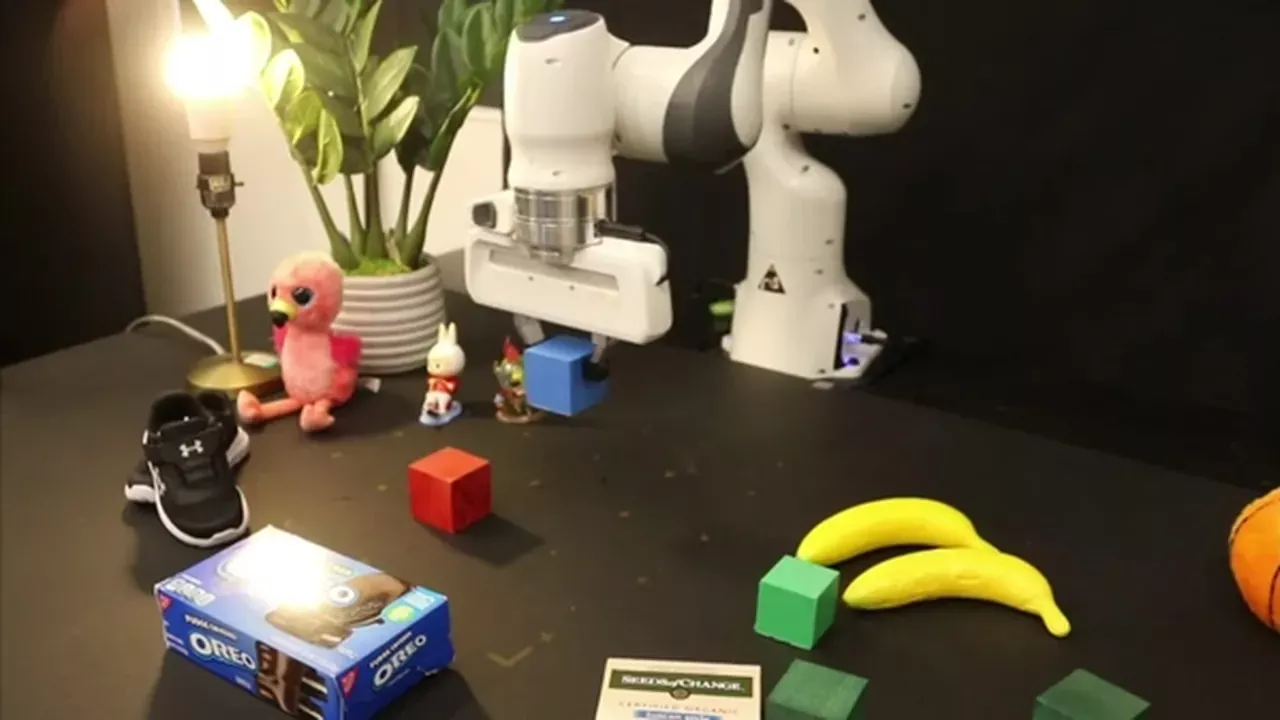
Більшість систем захоплення обʼєктів ідентифікують обʼєкт. Потім вони прогнозують захоплення, планують траєкторію та виконують її. Однак останні кілька сантиметрів є найважливішими. Тут дрібні помилки мають велике значення. Система Grasp-MPC адаптивно обчислює рухи для захоплення. Вона постійно коригує рух робота. Це відбувається під час наближення до обʼєкта. Такий підхід відрізняється від фіксованого плану. Можна порівняти це з тим, як людина бере щось. Вона керується відчуттями, не розраховуючи кожен кут суглоба заздалегідь.
Для розробки цієї політики дослідники створили два мільйони симульованих траєкторій. Це охопило вісім тисяч обʼєктів. Використовувались анотації з набору даних GraspGen. Також залучалися дані планування рухів з cuRobo. Ця бібліотека прискорює генерацію рухів роботів за допомогою CUDA. Після навчання на успішних та невдалих траєкторіях Grasp-MPC навчилася захоплювати нові обʼєкти. Вона працює на захаращених столах та полицях. Загальний показник успіху досяг близько 75%. Це на реальних роботах, тоді як базовий показник становив 41%.
Фреймворк Deformable Cluster Manipulation розвʼязує схожу проблему. Він дозволяє системам захоплювати не один обʼєкт, а цілий пучок матеріалу. Йдеться про гнучкі та заплутані предмети. Цей підхід був натхненний завданням з реального світу. Наприклад, прибирання маси гілок, що обплели лінію електропередач. У такій ситуації немає єдиного, чіткого обʼєкта для захоплення. Система використовує всю свою руку. Не лише захватний механізм. Вона обертає руку навколо пучка гілок. Потім відсуває його убік. Так само людина збирає оберемок кабелів або відштовхує купу хмизу. Дослідники побудували генератор дерев. Вони використовували біологічні рівняння росту. Це дозволило створити синтетичні дерева різних форм та розмірів. Потім систему навчали на тисячах таких обʼєктів. Використовувались відкриті симуляційні фреймворки NVIDIA Isaac. Ця політика розгортається на реальних гілках без додаткового навчання. Окрім ліній електропередач, потенціал розглядають для керування кабелями. Також це актуально для сільськогосподарських інспекцій. Це корисно скрізь, де роботам потрібно працювати з клубком. А не з одним предметом, який легко захопити.
Точне складання та перспективи робототехніки NVIDIA
Точне складання — це процес нагвинчування гайки на болт. Або вставляння шестерні на вал. Також це може бути втискання штифта в отвір. Досягти його лише за допомогою симуляції надзвичайно складно. Реальний світ дуже складний. Справжні поверхні не ідеально гладкі. Датчики можуть не працювати точно, як зазначено. Навіть найменші розбіжності, які людина легко ігнорує, можуть спричинити проблеми. NVIDIA Research продовжує роботу у цій сфері. Їхні рішення є ключовими для промислової автоматизації. Вони наближають нас до повністю автономних виробництв.
Перенесення симуляцій у реальний світ є фундаментальним для роботів. Вони зможуть адаптуватися та узагальнювати знання. Це також підвищить їхню надійність поза лабораторією. Завдяки розробкам NVIDIA, робототехніка стає все більш гнучкою. Вона здатна до самостійного навчання та взаємодії. Це відкриває нові можливості для багатьох галузей. Йдеться про логістику, медицину та промисловість. Технологія дозволить роботам працювати безпечніше. Вони також стануть ефективнішими. Завдяки ШІ та потужним симуляціям, роботи майбутнього стануть невідʼємною частиною нашого життя.
Досягнення NVIDIA Research у робототехніці знаменують новий етап. Роботи відходять від жорстких сценаріїв. Вони стають адаптивними та інтелектуальними. Перехід від симуляції до реальності є ключовим. Це дозволяє створювати надійніші автономні системи. Вони здатні ефективно працювати в будь-яких умовах. NVIDIA активно формує майбутнє, де роботи є невідʼємною частиною нашого світу.